















[银光VINKO] 智能电缸/机械手技术问答系列之第1篇:什么是智能电缸/机械手?
大家好,我是银色之光,一枚银光闪耀的超新星。
从今天开始,将由我为各位技术大咖们带来银光智能电缸/机械手技术问答系列文章。
今天给大家带来第一篇:什么是智能电缸/机械手?
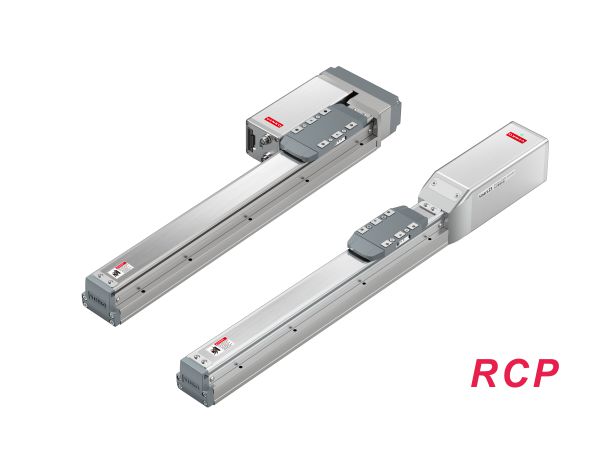
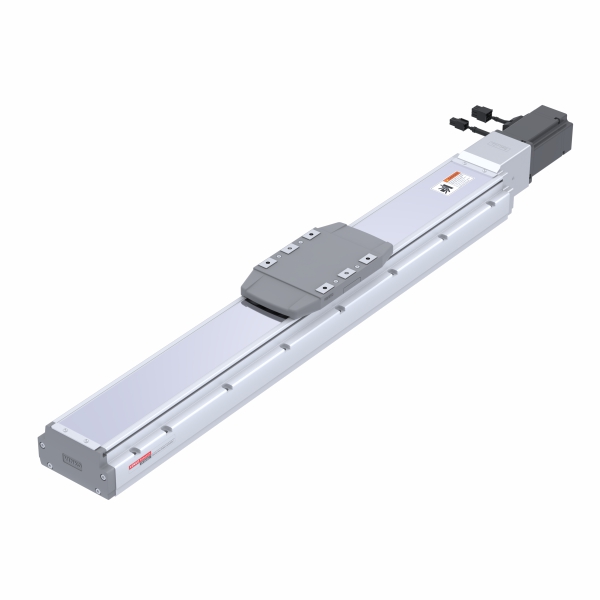
Ø 智能电缸:比直线模组更先进的新一代直线系统和XYZ直交机械手解决方案。
智能电缸(Intelligent Electric Actuator),也称之为智驱电缸/机械手,智能电动执行器,单轴机器人等,是一种高度集成化的直线运动装置,它将伺服电机、滚珠丝杠、导轨、驱动模块、控制模块等部件集成于一体,形成一个紧凑而高效的直线驱动系统。
通过模块化的单轴智能电缸可以快速地搭建客制化的两轴、三轴或四轴的XYZ直交型机械手臂,而XYZ直交型机械手臂是工业自动化设备和生产线用途最为广泛的模块化执行机构。可以用来完成定位、搬运、移载、轨迹、翻转、推压等各种常见动作。
智能电缸具有和机构更匹配兼容的驱动和控制系统。相比于传统直线模组和基础型的电动滑台,智能电缸在机构设计和控制策略上实现了更深层次的优化与创新,是机电一体化技术在直线运动控制领域的高端应用。
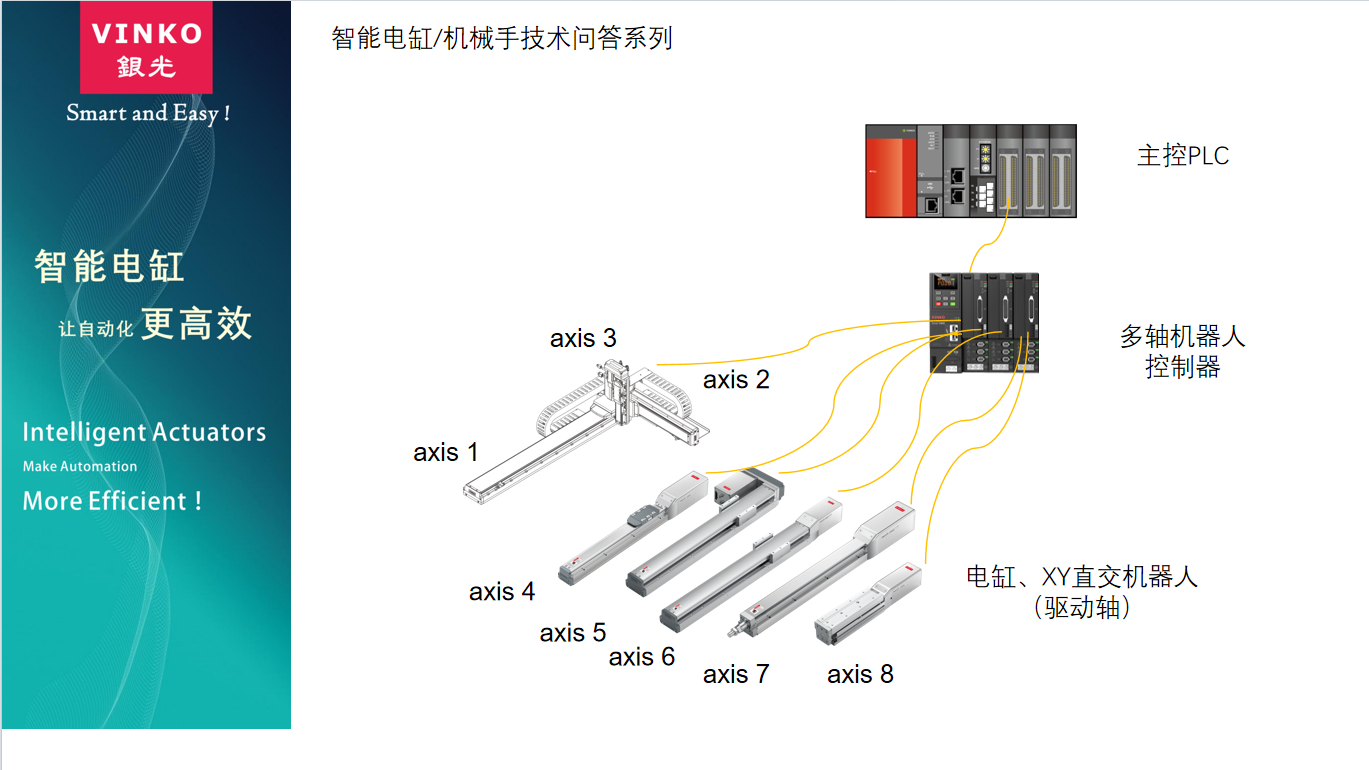
上图:银光智能电缸和控制器架构图
正是由于将机构、伺服和控制放在一个产品框架下来进行统筹设计并应用智能化技术,使得智能电缸可以实现以往传统直线模组方式下很难彻底消除的产品弊端,让智能电缸可以从安装空间、线缆布置、安装调试、编程、安全性和可靠性等方面,大幅度提高产品的综合性能。
从这个角度看,智能电缸无疑是一款技术更先进、更代表未来产业发展趋势的新一代直线系统和XYZ直交机械手解决方案。
传统的直线模组,虽然大体上实现结构通用,伺服电机可以通配的优势。但依然存在诸多弊端:
弊端之一:选型繁琐:
直线模组和电机是不同厂家生产,工程师需要花费相当的时间确认安装法兰,轴径,外形等尺寸和规格,过程繁琐,容易出错。
弊端之二:安装费事:
电机需要专人安装,伺服电机需要自行焊线,耗费人工,而且安装品质参差不齐。
弊端之三:结构松散:
由于电机都是标准件,需要适配联轴器、同步轮等标准件才能连接,结构松散,集成度不高,占用空间。
弊端之四:需要配置限位传感器:
通用的伺服电机一般仅支持外部传感器回零,一般一个模组上需要配置原点、正限位、负限位三个传感器。外挂传感器增加了本体的尺寸,传感器接线麻烦,需要占用额外的IO输入输出口,增加拖链的体积。
弊端之五:调试繁琐:
由于每款伺服对应的模组规格是多变的,工程师需要根据每款模组的型号设置导程、行程、加减速时间、增益、惯量等参数,还需要现场测试传感器通断和信号输出。
弊端之六:编程复杂:
工程师需要根据每个模组的动作逐个编写回零程序,用PLC或运动控制卡按运行动作一步一步编程,从程序调试到上电测试,需要经历繁琐而漫长的过程。
弊端之七:模组的寿命评估不严谨:
由于缺乏科学系统的核算工具,模组的寿命大部分情况下,工程师是靠经验预估,没有对负载、加减速、安装样式、润滑情况等进行综合的评估,模组存在过载、过速、超限的可能隐患。
弊端之八:程序缺乏保养规划:
绝大部分PLC工程师,在编程时没有考虑和设定模组的运行里程,保养时间提示。用户在设备交付之后,很难知道在什么时间要进行什么样的保养和防范,也无法知道模组的运行里程。
弊端之九:厂商协调难度大:
由于机构、伺服和控制往往是不同的厂家供应,但很多异常可能是三者组合后才会导致异常,但各厂家更倾向站在自身的立场撇清关系,而用户关注的是如果从根本上消除问题。
银光智能电缸的产品规划和设计初衷,正是基于上述用户和行业痛点,运用新一代的伺服和控制技术,来帮助用户实现结构更紧凑,调试更智能、编程更简单、性能更可靠的直线运动系统和XYZ直交机械臂系统。
银光的智能电缸产品目前规划了2个系列。Smart-Z3控制器内置型智能电缸和Smart-V8多轴控制器,产品涵盖RCP,RCF,RCA,MG,RF五大系列。并可扩展机器人控制模块。
Smart-Z3为控制器内置型智能电缸。采用一体化结构设计,无需外置驱动器,无需限位传感器,除了常用的伺服功能,还具有PIO 64位点位跟踪功能,工况参数自动校核,电缸识别,内置最优电缸参数和伺服参数,一键整定,自动保养设定和提示,里程记录等功能。支持485控制,脉冲,PIO点位跟踪和EtherCAT总线控制。

Smart-V8为多轴机器人控制器。实现多轴合一,轴数可灵活扩展,单台控制器可以控制10轴,可自动导入电缸/机器人型号和参数,机电无缝对接,预置最优化的电缸伺服参数。支持EtherCAT轴控模式,Profinet轴控模式,机器人工作站(程序型)模式。

Ø 总结
今天我们对智能电缸和机械手做了初步的了解,也是银光智能电缸/机械手技术问答系列的第一篇,期待您的持续关注。欢迎与我们随时交流!
目录预告:
第一类:功能和特点
1. 什么是智能电缸?
2. 智能电缸和模组有什么不同?
3. 银光智能电缸有什么优缺点?
4. 智能电缸为什么可以让接线更简单?
5. 智能电缸为什么可以让调试更智能?
6. 智能电缸为什么可以让编程更便捷?
7. 什么是智能电缸的一键自整定功能?
8. 什么是智能电缸的负载自动核验功能?
9. 智能电缸的寿命怎么预测?
10. 智能电缸为什么不需要传感器?
11. 智能电缸的控制器内置有什么好处?
12. 什么是智能电缸的PIO定位跟踪模式?
13. 如何评价智能电缸的综合性能?
14. 什么是智能电缸的预兆保养功能?
15. Z3智能电缸有几种控制模式?
16. VINKO Studio电缸控制软件有哪些功能?
17. 四列内嵌型循环导轨有哪些优点?
18. 智能电缸如何避免过载和过速?
19. 为什么Z3智能电缸EtherCAT只需要一根网线?
20. 智能电缸的完全轴控模式和IO站模式有什么不同?
21. 什么是智能电缸的动态容许力矩?
22. 如何用智能电缸快速搭建XYZ多轴组合机械臂?
23. 为什么智能电缸的485通讯功能不适合高响应的场合?
24. 什么是智能电缸的整定时间?
25. 为什么内嵌型模组/电缸比KK模组性能更优?
26. 一体式智能电缸为什么要配再生制动单元和电阻?
27. 智能电缸在使用过程中,如何做日常保养?
28. (陆续更新中)
第二类:选型和使用
1. 智能电缸的怎么选择负载?
2. 智能电缸怎么选择导程?
3. 智能电缸怎么选择控制模式?
4. 智能电缸怎么选择马达安装样式?
5. 智能电缸怎么选择线缆?
6. 什么情况下需要选择EtherCAT总线分支器?
7. 如何选择驱动电源?
8. 如何选择控制电源和刹车电源?
9. 电缸为什么要接地?
10. 智能电缸在安装设计时,需要规避哪些设计缺陷?
11. 第一次通电前,需要做哪些准备工作?
12. 第一次通电时,需要进行哪些设置?
13. 如何设置原点和偏移?
14. 如何通过软限位设置电缸运行范围?
15. 如何通过参数校核功能判定负载,速度,加速度是否超标?
16. 如何预测智能电缸的里程寿命?
17. PIO点位跟踪模式下,各信号逻辑步骤和时序是怎样的?
18. 脉冲模式下,对差分脉冲和集电极开路脉冲如何设置?
19. Z3电缸通用IO接口有哪些功能?
20. (陆续更新中)